김정 교수 연구팀, 현재의 로봇 촉각기술 한계 극복
인간 피부와 비슷한 상처 회복 및 촉각 복구 가능
의수·의족 피부로 사용…손·다리 절단 환자 제공

[중부매일 나인문 기자] KAIST 기계공학과 김정 교수 연구팀이 메사추세츠 공과대학(MIT), 슈투트가르트 대학교 연구원과 공동 연구를 통해 '넓은 면적에 대해 다양한 외부 자극을 인지할 수 있고, 칼로 베어도 다시 기능을 회복할 수 있는 로봇 피부 기술'을 개발하는데 성공했다.
연구팀은 로봇 분야의 비약적인 발전에도 불구하고 대부분의 로봇이 사람의 피부와 달리 딱딱한 외피를 갖고 있는 점에 착안, 이번 연구를 수행하게 됐다. 이특히 인간의 가장 큰 장기인 피부는 인체 내부를 충격에서 보호함과 동시에 주위로부터 물리적인 자극을 전달하는 통로로, 피부를 이용한 촉감은 표면 인식, 조작, 쓰다듬기, 꼬집기, 포옹, 몸싸움 등 종류가 다양하다는 점에서 로봇에 접목을 시도했다.
현재의 로봇 촉각 기술로는 '인간의 피부처럼 부드러운 물성과 복잡한 3차원 형상을 가지고, 섬세한 촉각 정보를 수용하는 것이 가능한 로봇 피부'를 개발하는데 한계가 있었다는 점에서 획기적인 성과로 평가된다.
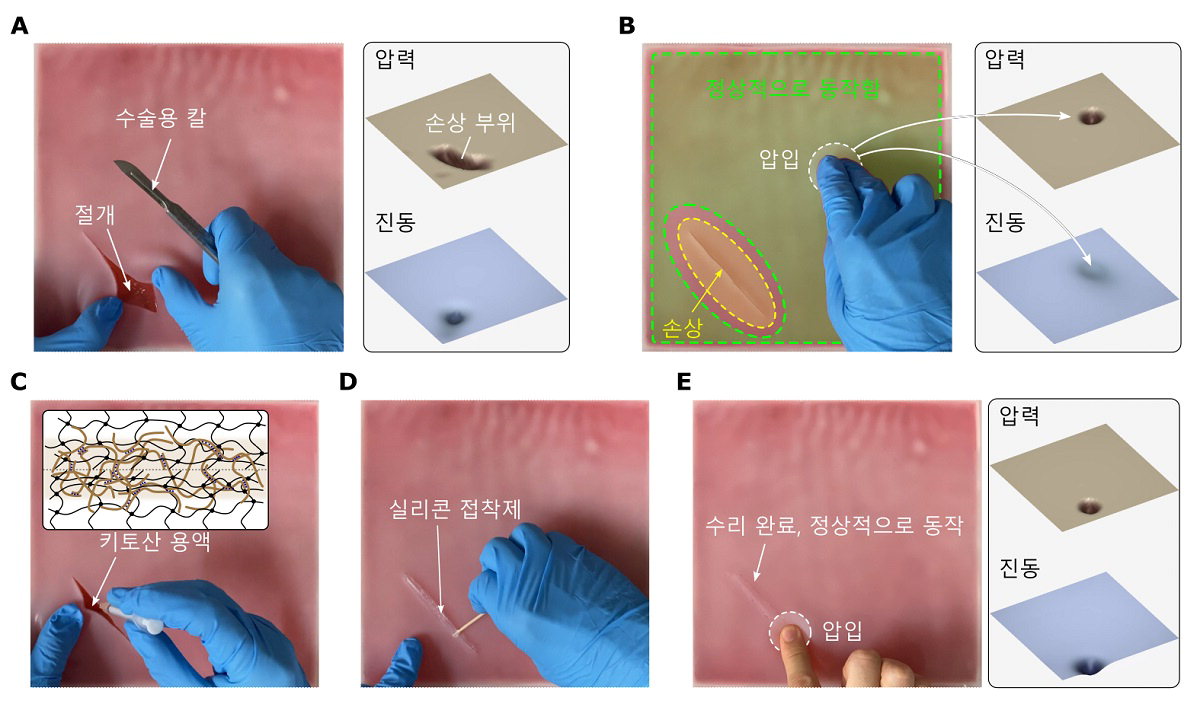
또한 사람의 피부는 날카로운 물체에 베어 절상·열상이 발생하더라도 신축성과 기능을 회복하는 치유 기능을 갖고 있는 것과 달리, 로봇 분야는 현대 기술로 재현하는데 어려움이 있었던 게 사실이다.
연구진은 이러한 상황을 극복하기 위해 사람과 로봇의 다양한 수준의 물리적 접촉을 중재하기 위해 부드러운 물성을 가지면서 다양한 3차원 형상을 덮을 수 있는 대면적 촉각 로봇 피부 기술이 필요하다고 판단했다.
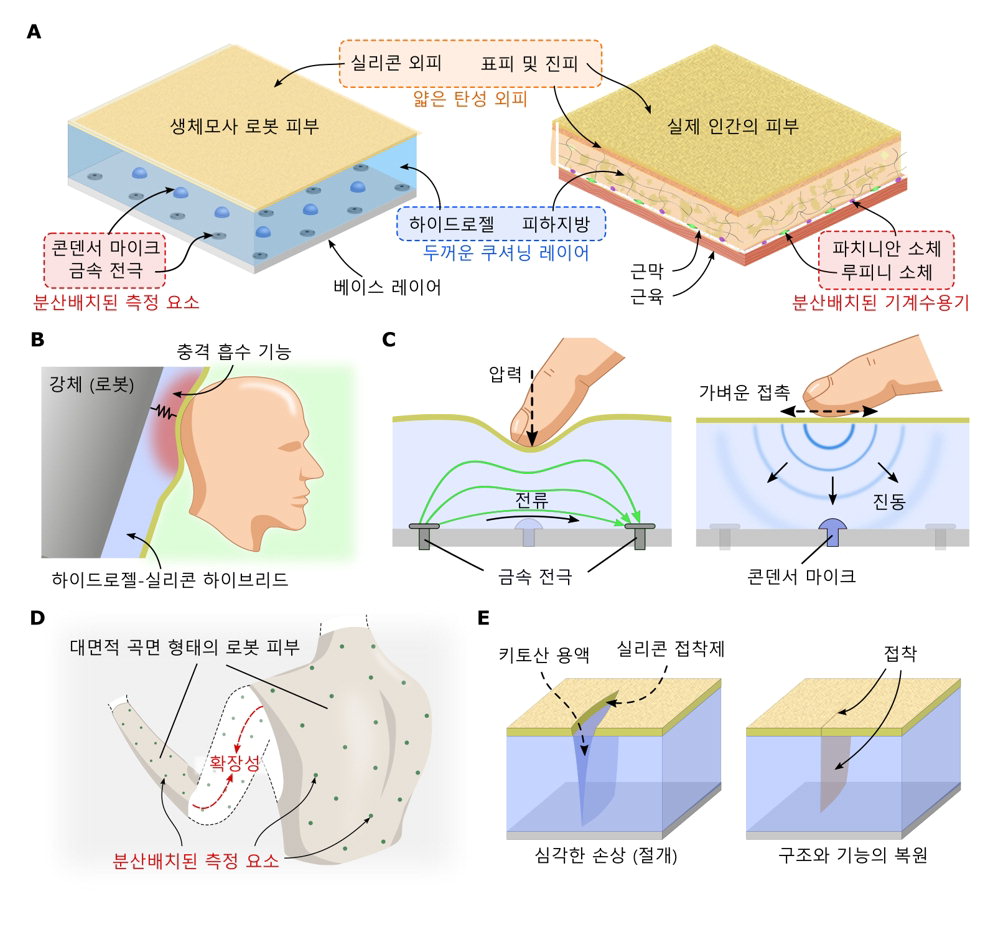
김정 교수 연구팀은 로봇 피부를 만들기 위해 생체모사 다층구조와 단층촬영법을 활용했다. 이 기술은 인간 피부의 구조와 촉각수용기의 특징과 구성 방식을 모사해 적은 수의 측정 요소만으로도 넓은 3차원 표면 영역에서 정적 압력(0~15㎐) 및 동적 진동 (15~500㎐)을 실시간으로 감지하고 국지화하는 것을 가능토록 했다.
연구팀은 또 측정된 촉감 신호를 인공지능 신경망으로 처리함으로써 누르기, 두드리기, 쓰다듬기 등 촉각 자극의 종류를 분류하는 것도 가능토록 했다.
또한 개발된 로봇 피부는 하이드로젤, 실리콘 등 부드러운 소재로 만들어 충격 흡수가 가능하고, 날카로운 물체에 의해 깊게 찢어지거나 베어도 피부의 구조와 기능을 손쉽게 회복하는 것이 가능하다.
이에 따라 점점 대중화되는 식당의 서빙 로봇처럼 사람과 다양한 접촉 및 상호작용이 필요한 응용 분야에 유용하게 활용될 것으로 기대했다. 나아가, 로봇 피부를 의수·의족의 피부로 사용한다면 실제 사람의 손·다리와 똑같은 외형과 촉감 감각을 절단 환자들에게 제공할 수을 것으로 보고 있다.
한편, 이번 연구는 한국연구재단 중견연구자지원사업의 지원을 받아 수행됐으며,KAIST 기계공학과 양민진·조준휘 박사과정과 메사추세츠 공과대학(MIT)의 육현우 박사, 슈투트가르트 대학교 이효상 교수가 공동연구자로 참여했다.
KAIST 박경서 박사가 제1 저자로 참여한 이번 연구는 국제 학술지 '사이언스 로보틱스(Science Robotics)'에 6월 9일자에 게재됐다.